
د اور وژنې روبوټ RXR-J150D
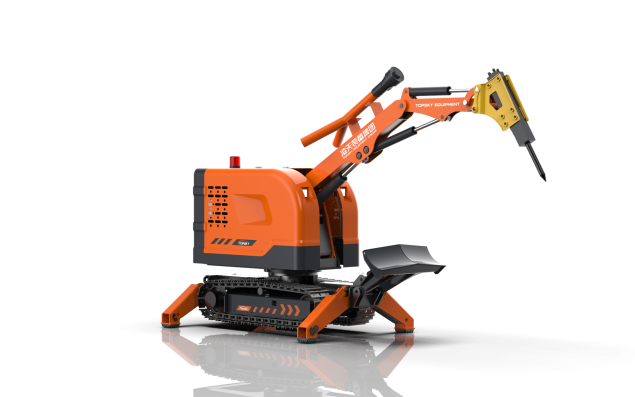

کتنه
دا کولی شي خلک په زهرجن (ککړ شوي) ، سقوط شوي ، قوي وړانګو او نورو ځانګړي خطرناک ریسکیو ځایونو کې ځای په ځای کړي ، او همدارنګه کولی شي د ودانولو تخریب ، کانکریټ برمه کولو او پرې کولو ، د تونل کیندنې ، بیړني ژغورنې ، فلزي فرنس سلیګ کولو او استر لرې کولو لپاره له لرې لرې روبوټ کنټرول کړي ، د روټري بټو ساتنه او د تلفاتو مخنیوي لپاره د اټومي تاسیساتو تخریب؛
د غوښتنلیک ساحه
l د لوی پټرولیم او کیمیاوي شرکتونو لپاره د اور ژغورنې
l تونلونه، فرعي لارې او نور ځایونه چې د سقوط لپاره اسانه دي او د ژغورنې او اور وژنې ته د ننوتلو اړتیا لري
l په داسې چاپیریال کې ژغورنه چیرې چې د اور وړ ګاز یا مایع لیک او چاودنه خورا لوړه وي
l په چاپیریال کې د سخت لوګي، زهرجن او زیان رسونکي ګازونو او نورو سره ژغورنه.
l په داسې چاپیریال کې ژغورنه چیرې چې نږدې اور ته اړتیا وي او خلک له نږدې کیدو وروسته د تلفاتو خطر لري
فیورز
- ★ د ماشینونو په ورته کچه کې، ځواک ډیر دی او د چلولو ځواک پیاوړی دی؛
- ★ روبوټ په لیرې توګه فعال او بند کیدی شي، او ډیزلي انجن د بریښنا په توګه کارول کیږي، کوم چې د بیټرۍ سره د روبوټ په پرتله خورا پیاوړی دی او د بیټرۍ اوږد ژوند لري؛
- ★ د څو-فعاله وقفې وسیلې سر سره سمبال شوی، د ډیری عملیاتي طریقو سره لکه پرې کول، پراخول، نچوړ کول او کرش کول؛
- ★ د چاپیریال کشف فعالیت (اختیاري): د روبوټ سیسټم د چاپیریال څارنې ماډل سره سمبال شوی ترڅو په ساحه کې لوګي او خطرناک ګازونه کشف کړي؛
تخنیکي پارامترونه:
4.1 ټول روبوټ:
- نوم: اورد تخریب روبوټ
- ماډل: RXR-J150D
- بنسټیز کارونه: د څو اړخیزه بریک-ډاون وسیلې سر، د ډیری عملیاتو طریقو سره لکه پرې کول، پراخول، سکچ کول، او کرش کول؛
- د اور وژنې د صنعت معیارونو پلي کول: "GA 892.1-2010 د اور وژنې روبوټ برخه 1 عمومي تخنیکي اړتیاوې"
- ★ د چیسس جوړښت: د ATV هیدرولیک کرالر چیسس منل شوی
- ★برښنا: ډیزلي انجن (27kw) + د هیدرولیک پمپ سیسټم
- ابعاد: اوږدوالی 3120mm*عرض 800mm*لوړوالی 1440mm
- ★ د چلولو پلنوالی: ≤800mm
- ★ د چلولو لوړوالی: ≤1450mm
- وزن: 2110kg
- ★ترکشن ځواک: ≥10000N
- ★د دوزر زور: ≥10000N
- ★ اعظمي مستقیم سرعت: ≥0~3km/h، د ریموټ کنټرول بې قدمه سرعت
- د ختلو وړتیا: 58% (یا 30°)
- د ریموټ کنټرول فاصله: 100m
- ★د ژغورنې وړتیا: د پش بیلچ جوړ شوی، چې د خنډونو لرې کولو لپاره کارول کیدی شي؛په پای کې د کرشن حلقه جوړه شوې، کولی شي د ژغورنې توکي د ناورین ځای ته ورسوي، او کولی شي د ژغورنې موټرې د ژغورنې ځای ته ورسوي؛
4.2 څو اړخیز سیسټم:
① هیدرولیک هامر:
د اغیز ځواک (جول): ≥250
د اغیزې فریکونسۍ (وختونه / دقیقې): 600~۹۰۰
د ډرل راډ قطر (mm): 45
② څو اړخیزه غصب (اختیاري):
اعظمي پرانستلو (mm): ≥700
د غصب وزن (کیلوګرامه): ≥150
ظرفیت (L): ≥21
عرض (mm): ≤480
دنده: دا د 360 درجې گردش د غصب، راټولولو او لیږدولو دندې لري
③ څو اړخیزه غصب (اختیاري):
د بندولو وزن (کیلوګرامه): ≥150
اعظمي پرانستلو (mm): ≥680
فنکشن: دا د لویو توکو د نیولو، سمبالولو، کلیمپ کولو او لیږدولو لپاره څرخیدونکی فعالیت لري
④ د ویښتو پراخونکی (اختیاری):
د ویښتو ځواک (KN): ≥200
د پراختیا ځواک (KN): ≥30
فنکشن: د گردش فعالیت سره، دا کولی شي د پرې کولو، پراخولو، ویشلو او غوره کولو عملیات بشپړ کړي
⑤ دوزر (اختیاری):
اوږدوالی * پلنوالی (mm): ≤780*350
د پورته کولو لوړوالی (mm): ≥670
دنده: د ثابت ملاتړ په توګه کارول کیږي کله چې خنډونه پاکوي او د موټر بدن موقعیت لري
⑥ بریښنایی وینچ (اختیاری):
د موټر چلولو حالت: بریښنایی ډرایو
دنده: د ځړول شوي وسایط او تجهیزات راښکته کول او د ځان ژغورنې لپاره هم کارول کیږي
4.3 د روبوټ اور وژونکي سیسټم (اختیاري):
- د اور وژنې څارنه: د کورني بریښنایی کنټرول شوي اور وژنې څارنه
- د اور وژونکي اجنټ ډول: اوبه یا فوم
- مواد: د ټوپک بدن - سټینلیس سټیل ، د ټوپک سر - المونیم مصر سخت انود شوی
- کاري فشار (Mpa): 1.0~1.2 (Mpa)
- د سپری طریقه: مستقیم جریان، اټومیزیشن، د ټیټ پراخولو فوم
- ★د اوبو/فوم د جریان کچه: 80L/s
- حد (m): 85m (اوبه)
- ★ د څرخې زاویه: په افقي ډول د موټر د څرخيدونکي میز سره څرخي، او عمودي د میخانیکي بازو سره څرخیږي
- د سپری اعظمي زاویه: 120 °
- د فوم ټیوب: د فوم ټیوب ځای په ځای کیدی شي ، او د بدیل میتود ګړندی اړیکه ده.د اور وژنې د اوبو څارونکی کولی شي اوبه، فوم او مخلوط مایع سپری کړي، ترڅو یو شاټ د ډیری موخو لپاره وکارول شي.
4.4 د روبوټ کشف سیسټم (اختیاري):
د ګازو وسایلو او د چاپیریال څارنې ماډلونو په ترتیب سره، د کار په ساحه کې د زهرجن او زیان رسوونکو ګازونو لیرې کشف کول ترسره کیدی شي؛
- ★ د ګازو او چاپیریال احساس کولو کشف ماډل (اختیاري): د بې سیم بیړني ریسکیو ګړندي ځای په ځای کولو کشف سیسټم او د تودوخې او رطوبت کشف کونکي سره مجهز، کوم چې کشف کولی شي: PM2.5، شور، VOC، O3، SO2، H2S، NO، CO، CH4، د تودوخې رطوبت؛
4.5 د ریموټ کنټرول ترمینل ترتیب کولو پیرامیټونه
- د کار وخت: 8h
- اساسي دندې: درې پروف ریموټ کنټرول، د ایرګونومیک پټې ملاتړ کول؛د روبوټ مخکی، شاته، سټیرینګ او نور حرکتونه کنټرول کړئ؛روبوټیک بازو پورته او ښکته کنټرولوي، گردش؛وسیله د خلاصولو، تړلو او څرخولو لپاره جوړه شوې؛د مستقیم اوسني او اټومي کولو لپاره د اوبو توپ.د ډیټا لیږد میتود د بې سیمه لیږد لپاره کوډ شوی سیګنال غوره کوي.
- د چلولو کنټرول فعالیت: هو ، دوه واحد محور صنعتي جویسټیکونه ، یو جویسټیک د روبوټ په ښي اړخ کې د کرالر مخکی او شاته عملیات درک کوي ، او یو د ښي کرالر مخکښ او شاته عملیات درک کوي
- د اور وژونکي کنټرول فعالیت: هو
- هیدرولیک هامر، د څو فنکشن غصب، غصب، د ویښتو پراخونکی او نور دندې: هو
- د رڼا څراغ، د خبرتیا څراغ کنټرول فعالیت: هو، د ځان تالاشۍ سویچ
- مرستندویه وسیله: د ریموټ کنټرول ترمینل اوږه پټه
4.6 د انټرنیټ فعالیت:
1. د GPS فعالیت (اختیاري): د GPS موقعیت، ټریک کولی شي پوښتنه وشي
4.7 نور:
★ د بیړني ترانسپورت پلان (اختیاري): د روبوټ وقف شوي ټرانسپورټ ټریلر یا د روبوټ وقف شوي ټرانسپورټ موټر
د محصول ترتیب:
- د اور وژنې روبوټ × 1
- د لاسي ریموټ کنټرول ټرمینل × 1
- روبوټچارجر (27.5V) × 1 سیټ
- د روبوټ کلاوډ مدیریت پلیټ فارم × 1 سیټ (اختیاري)
- د روبوټ بیړني ټرانسپورټ موټر × 1 (اختیاري)





